

Zawsze fascynowały mnie technika, radio i elektronika. Budowa własnego, w pełni sterowanego podwodnego robota to kolejny krok – czas zejść pod powierzchnię.
Na tym blogu pojawi się relacja z tworzenia ROV-a od podstaw – bez gotowych kitów, bez dużego budżetu, za to z solidną dawką planowania, testów, poprawek i satysfakcji z każdego rozwiązania problemu pod wodą (i nie tylko).
Projekt zaczynam klasycznie: Raspberry Pi 3B+ z BlueOS, kontroler Pixhawk, własne thrusterki i podejście DIY. Planuję dodać własne czujniki, sporo lutowania i szukanie kompromisów między teorią a praktyką. Celem jest zbudowanie robota, który będzie mógł eksplorować miejsca niedostępne dla człowieka, przesyłając obraz oraz dane do analizy.
Inspirację czerpię z projektów Blue Robotics, ale cały czas szukam autorskich rozwiązań, łącząc gotowe moduły z elementami własnego pomysłu. Aktualnie mam już przygotowane Raspberry Pi 3B+ z BlueOS oraz Pixhawk – to one będą stanowiły centrum systemu sterowania.
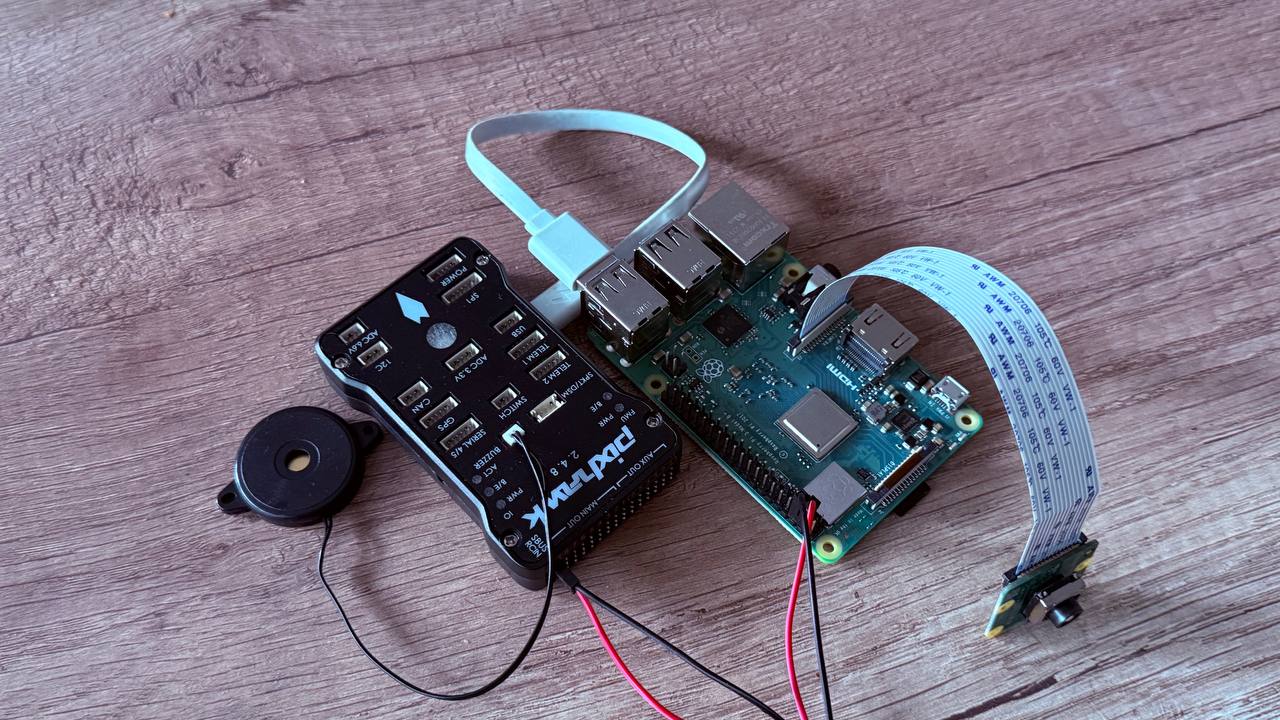
Pierwsze tety elektroniki na stole
Dlaczego BlueOS? To otwarta i elastyczna platforma, która pozwala łatwo integrować różne podzespoły oraz obsługuje zaawansowane funkcje, takie jak streaming wideo czy telemetria przez sieć LAN. Dzięki temu cała konfiguracja i diagnostyka jest dostępna przez przeglądarkę, co znacząco ułatwia pracę i pozwala szybciej przejść od prototypowania do testów. Dodatkowo, duża społeczność użytkowników BlueOS ułatwia rozwiązywanie problemów i wprowadzanie nowych funkcji.
Obecnie pracuję nad projektem płyty montażowej pod elektronikę oraz koncepcją wodoszczelnej obudowy, która pozwoli chronić wszystkie komponenty w środowisku wodnym.
1. Wyzwanie pierwsze — uszczelnienie komory elektroniki
Elektronikę zamknę w pleksiglasowej tubie o średnicy 100 mm, grubości ścianek 3 mm, co daje nam średnicę wewnętrzną 94 mm. Korki na końcach tuby będą drukowane na drukarce 3D i uszczelnione gumowymi oringami.
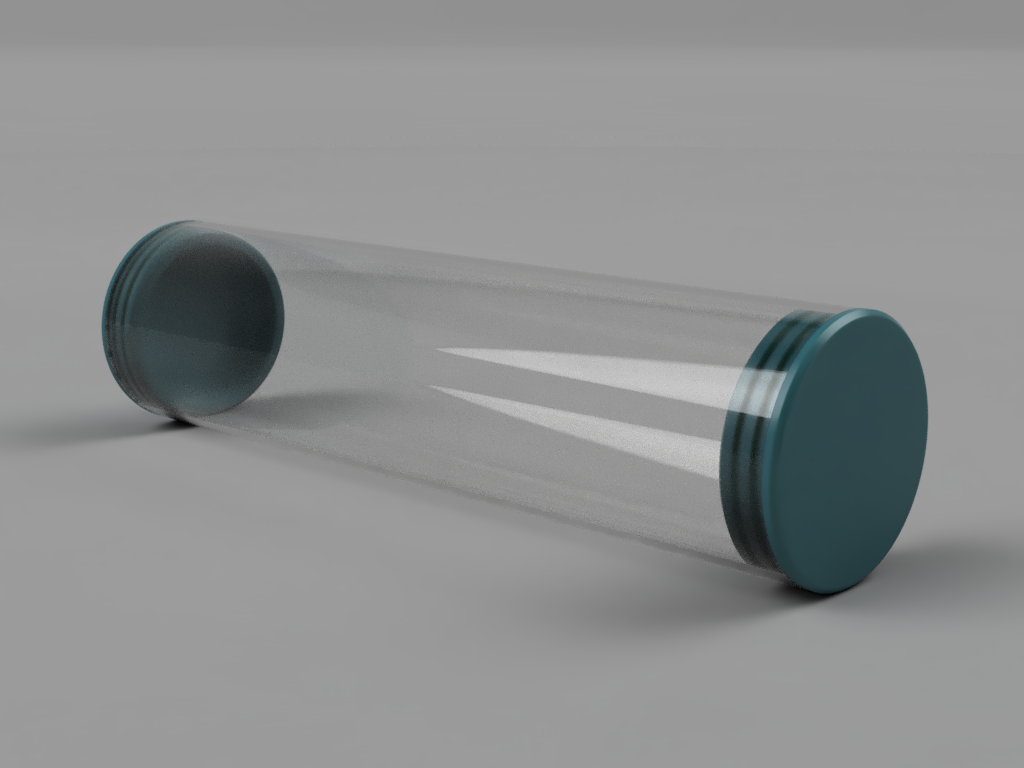
Tuba na elektronikę z endcapami w wersji testowej do przeprowadzenia testów szczelności.
Na tym etapie pojawiają się dwa praktyczne wyzwania:
-
Po pierwsze: sama szczelność i gładkość powierzchni wydruku. Nawet najlepszy filament i wysokie rozdzielczości nie zastąpią idealnie gładkiego, szlifowanego aluminium czy stali. Każda drobna nierówność na powierzchni kontaktowej korka czy rowka pod oring może stać się potencjalnym miejscem przecieku — a pod wodą nawet mikroszczelina potrafi zrujnować elektronikę w kilka sekund.
-
Po drugie: poprawny dobór wymiarów i parametrów uszczelnienia. O-ring nie może być ani za luźny na korku (za mało rozciągnięty), ani zbyt mocno ściśnięty przez rurę. Zbyt duży stretch może powodować nadmierne rozciągnięcie oringa i osłabienie uszczelnienia, z kolei za mały squeeze sprawi, że guma nie dolega wystarczająco do ścianek, a za duży — że oring szybko się zdeformuje lub nawet zostanie przecięty ostrą krawędzią rowka.
Tu właśnie pojawia się cała “sztuka” projektowania uszczelnień.
Wybór katalogowego oringa to jedno, ale policzenie:
-
jaka powinna być dokładna średnica pod oring na korku,
-
jak szeroki i jak głęboki musi być rowek,
-
jaki luz montażowy zostawić,
to wszystko ma znaczenie. Szczególnie, jeśli docelowy wydruk jest z tworzywa, które “pracuje” i ma ograniczoną precyzję wymiarową (a to w druku FDM codzienność).
Stretch i squeeze — podstawy teorii uszczelniania O-ringami
Projektując uszczelnienie z użyciem O-ringa, trzeba pilnować dwóch podstawowych parametrów geometrycznych:
-
Stretch – rozciągnięcie O-ringa na korku, czyli procentowa różnica pomiędzy katalogową średnicą wewnętrzną O-ringa, a średnicą rowka (czyli miejsca, gdzie O-ring leży na korku).
-
Squeeze – promieniowy “ucisk” O-ringa przez ściany rury po złożeniu całości, liczony jako procentowy udział spłaszczenia przekroju O-ringa po zamknięciu w rowku.
Dlaczego to ważne?
-
Zbyt mały stretch: O-ring będzie za luźny, może wypadać podczas montażu, a uszczelnienie może nie być stabilne.
-
Zbyt duży stretch: O-ring ulega nadmiernemu rozciągnięciu, staje się cieńszy i twardszy, przez co traci elastyczność i szybciej się starzeje.
-
Zbyt mały squeeze: O-ring nie dociska do ścianek rury, a szczelność jest iluzoryczna.
-
Zbyt duży squeeze: nadmierne spłaszczenie powoduje deformacje i przyspieszone zużycie lub uszkodzenie O-ringa (np. przecięcie podczas montażu).
Typowe zalecane zakresy wg norm i producentów (np. Parker, Trelleborg, ISO 3601):
-
Stretch (rozciągnięcie O-ringa):
-
aplikacje statyczne (czyli tak jak korek w rurze):
1–5% (optymalnie 2–3%) -
aplikacje dynamiczne (np. tłoki, wały):
0–2% (najlepiej <1%)
-
-
Squeeze (ucisk promieniowy):
-
aplikacje statyczne:
8–20% (optymalnie 12–16%) -
aplikacje dynamiczne:
8–12%
-
Wysoko cenione źródło wiedzy:
-
Parker O-Ring Handbook (rozdziały 4.2, 4.3 i 4.6)
-
ISO 3601-2:2013 (norma O-ringów — sekcje o doborze wymiarów i tolerancji)
-
Trelleborg Sealing Solutions: O-Ring Calculator (dostępny online)
Dla dociekliwych, fragment z Parker Handbook (tłumaczenie):
„Dla aplikacji statycznych stretch O-ringa na wałku powinien mieścić się w zakresie 1–5%. Przy wysokim ciśnieniu i dużym squeeze, stretch należy ograniczyć do dolnej granicy. Squeeze powinien wynosić od 8 do 20% dla większości zastosowań statycznych.”
Dlatego napisałem sobie prosty program, który automatycznie dobiera optymalny oring i sugeruje wymiar rowka, squeeze i stretch — biorąc pod uwagę ciśnienie, tolerancję montażu i katalogowe zalecenia producentów. Dzięki temu mogę mieć większą pewność, że komora elektroniki przetrwa zanurzenie nawet na 40 metrach głębokości.
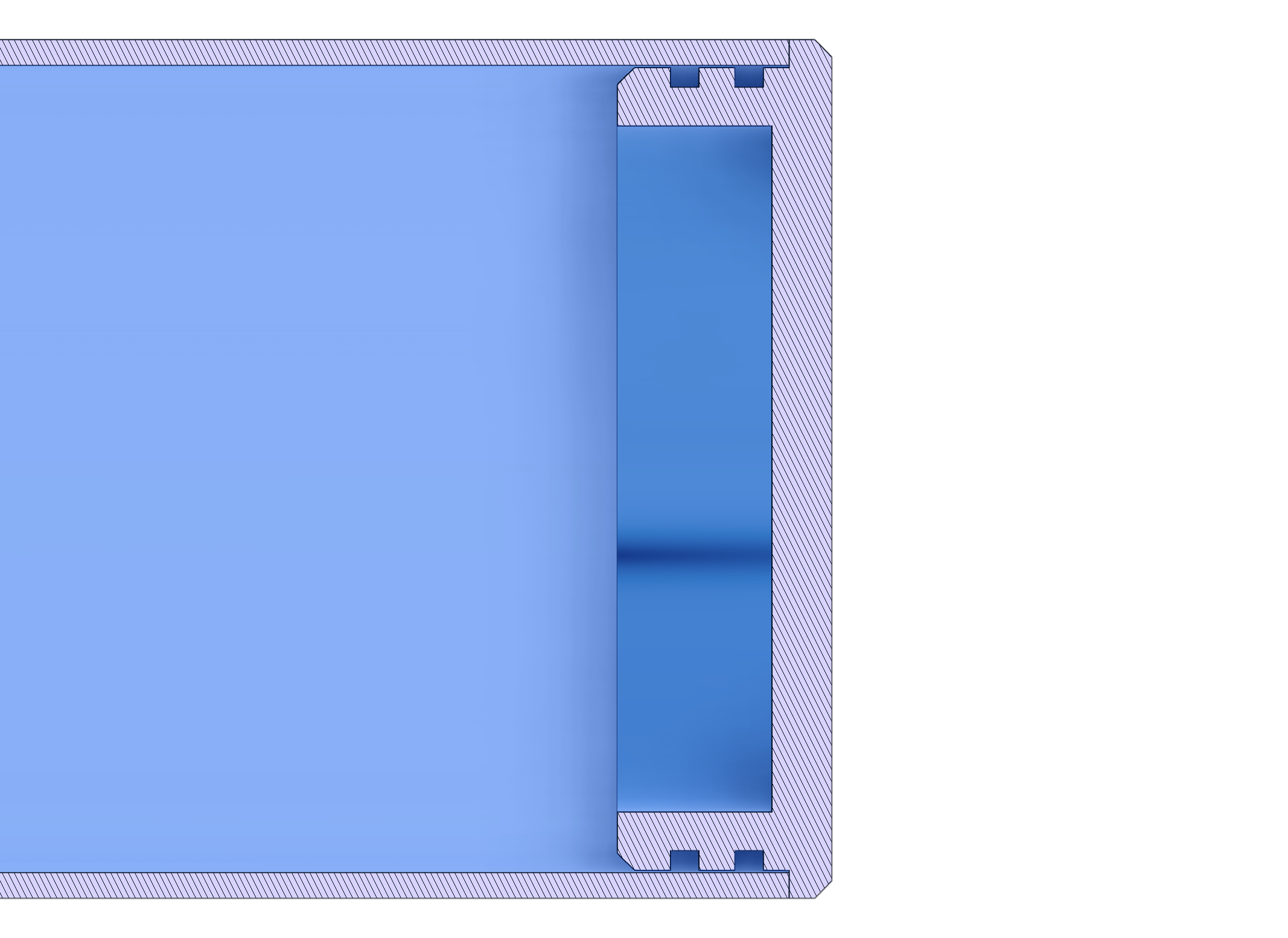
Przekrój miejsca uszczelnienia korka i rury
Przykład doboru dla oringa o grubości 2mm:
Podaj średnicę wewnętrzną rury [mm] [94]: 94 Podaj grubość oringa [mm] [2]: 2 Podaj ciśnienie [bar] [4]: 4 Podaj luz montażowy [mm] [0.4]: 0.4 --- Najlepsze dopasowanie --- O-ring katalogowy: Ø88 mm x 2 mm dopasowanie 83.3% Stretch: 3.00% zalecane 1%–5% (środek 3.00%, odchyłka -0.0%) Squeeze: 16.0% zalecane 8–20% (środek 14.0% odchyłka +33.3%) Średnica korka: Ø93.60 mm Średnica pod oring (rowek): Ø90.64 mm Szerokość rowka: 2.20 mm Głębokość rowka: 1.48 mm --- Podsumowanie iteracji --- Liczba przetestowanych rozmiarów oringów: 43 Liczba wszystkich kombinacji (suma prób stretch): 121 Krok stretch: 0.001 (0.1%)
Przykład doboru oringa o grubości 3mm
Podaj średnicę wewnętrzną rury [mm] [94]: 94 Podaj grubość oringa [mm] [2]: 3 Podaj ciśnienie [bar] [4]: 4 Podaj luz montażowy [mm] [0.4]: 0.4 --- Najlepsze dopasowanie --- O-ring katalogowy: Ø86 mm x 3 mm dopasowanie 78.3% Stretch: 3.40% zalecane 1%–5% (środek 3.00%, odchyłka +20.0%) Squeeze: 15.4% zalecane 8–20% (środek 14.0% odchyłka +23.3%) Średnica korka: Ø93.60 mm Średnica pod oring (rowek): Ø88.92 mm Szerokość rowka: 3.30 mm Głębokość rowka: 2.34 mm --- Podsumowanie iteracji --- Liczba przetestowanych rozmiarów oringów: 41 Liczba wszystkich kombinacji (suma prób stretch): 1640 Krok stretch: 0.001 (0.1%)
Program liczy dopasowanie w parametrze squeeze i stretch, wylicza też ogólne dopasowanie. Oprócz tego w podsumowaniu widać w ilu iteracjach dotarł do zadowalających wartości.
W moim konkretnym przypadku jak widać oring o grubości 2mm został dobrany szybciej, i jest lepiej dopasowany.
Zapraszam do śledzenia postępów projektu. Sam jestem ciekaw, które elementy okażą się największym wyzwaniem, a które pójdą zgodnie z planem i ile czasu będzie trwał projekt.
p.s.
Link do kalkulatora: https://github.com/SQ9MDD/OringCALC